

🌟亲爱的技术同仁们,诚挚欢迎您访问【云端技术驿站】!在这个数字化浪潮席卷全球的时代,我们致力于打造一个融合创新技术与实践经验的交流平台。这里不仅有前沿的技术分享,更期待您带来独到的行业见解,让我们携手在科技创新的道路上共同成长!🌟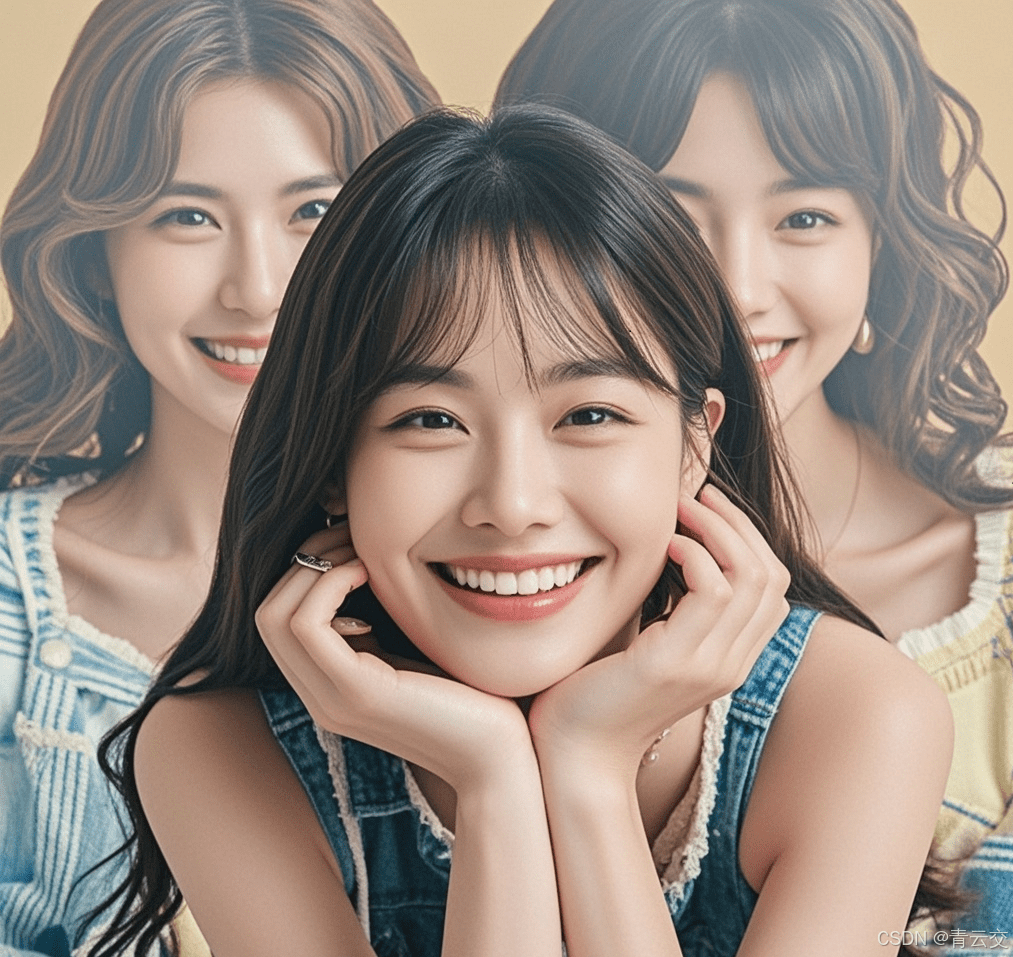
全平台账号(微信公众号/CSDN/抖音/华为/支付宝/微博):云端技术驿站
一、欢迎加入【技术精英联盟】
快速通道1:云端技术精英社群(最新)
快速通道2:CSDN技术创作交流营(最新)
二、核心专栏推荐:
1. 大数据前沿探索:深入解析大数据技术在各领域的创新应用
2. Java技术全景(新):从基础语法到企业级框架的完整知识体系
3. 名企面试指南:揭秘顶级科技公司面试技巧与经验
4. Python智能应用:探索人工智能与数据分析的Python实践
5. JVM深度解析:系统讲解Java虚拟机原理与调优
6. Java进阶之路:为开发者量身定制的学习路线图
7. JVM性能突破:解密Java虚拟机的高效运行机制
8. 人工智能前沿:追踪AI技术最新发展趋势
9. 智能创新实践(新):展示AI技术在实际场景中的创新应用
10. 数据库大师课:构建高性能数据库系统的完整指南
11. MySQL实战精要:掌握数据库管理的核心技巧
12. 前端技术风向标:聚焦最新前端框架与开发实践
三、技术社区特色频道:
1. 技术交流圈:汇聚行业专家与技术爱好者,促进知识共享
2. 每日技术精选:精选优质技术文章与行业动态
3. 精品资源库:汇集高质量学习资料与实战案例
4. 成长轨迹:记录技术人的进步历程
5. 技术影响力榜:展示社区活跃技术专家
6. 行业领袖榜:呈现领域内杰出贡献者
7. 每周创作之星:表彰优质内容创作者
作为技术前沿的探索者,我将持续深耕人工智能与大数据领域,输出深度技术解析,搭建通往科技前沿的知识桥梁。即将推出创新技术挑战活动,通过代码实战激发社区活力,促进技术交流。
您的每一次互动都是我们进步的动力。我们将持续优化内容质量,拓展行业合作,汇聚优质资源,助力您的技术成长。欢迎访问【技术驿站主页】或【技术精英圈】,如需技术咨询、资源获取或商务合作,可通过文末联系方式与我们取得联系。
让我们携手共建技术生态,在创新之路上共同成长!
Java技术全景——大数据在智能物流机器人路径优化与任务分配中的创新应用(188)
背景介绍
各位Java与大数据技术爱好者,在数字化转型浪潮中,Java大数据技术正以前所未有的速度改变着各行各业。从科研数据管理到智慧养老,从工业生产到影视推荐,这项技术正在创造无限可能。
如今,电子商务的蓬勃发展对物流系统提出了更高要求。仓储机器人作为现代物流的核心装备,其运行效率直接影响整个供应链的响应速度。Java大数据技术凭借其强大的数据处理能力,正在为智能物流领域带来革命性的变革。
技术解析
智能物流发展现状
全球智能物流市场正经历爆发式增长。行业数据显示,过去五年该领域年均增速超过25%。各大电商平台纷纷加大自动化仓储投入,但实际运营中仍面临诸多挑战。
现代仓储环境具有高度复杂性。以某电商平台为例,其仓储中心面积达15万平方米,管理超过15万种商品,日均处理订单量突破80万单。在促销高峰期,订单量激增至日常的10倍以上,导致机器人路径冲突频发,平均搬运效率下降40%。
Java大数据助力路径优化
多源数据整合处理
实现精准路径规划需要整合多种传感器数据。激光扫描仪可构建厘米级精度的环境模型,视觉系统识别货物特征,近距传感器确保运行安全。
通过Java强大的数据处理能力,我们可以高效整合这些异构数据源。以下代码示例展示了数据采集的实现方式:
// 环境数据采集处理器
class EnvDataCollector {
// 模拟激光扫描数据
public Map<String, double[]> getLaserScan() {
Map<String, double[]> scanData = new HashMap<>();
// 模拟360度扫描数据
for(int i=0; i<360; i++) {
scanData.put("angle_"+i, new double[]{Math.random()*10});
}
return scanData;
}
// 获取视觉识别结果
public Map<String, Object> getVisualData() {
Map<String, Object> visualData = new HashMap<>();
visualData.put("objectType", "electronic");
visualData.put("position", new int[]{3,5});
return visualData;
}
}
智能路径算法实现
在路径规划算法中,改进型A*算法因其高效性被广泛应用。该算法通过评估节点代价函数,能够快速找到最优路径。
以下为算法核心实现:
// 路径节点定义
class PathNode {
int x,y; // 坐标位置
int cost; // 移动代价
PathNode parent; // 路径回溯
public PathNode(int x, int y) {
this.x = x;
this.y = y;
}
}
// A*算法实现
public class AdvancedAStar {
// 定义移动方向
private static final int[][] MOVES = {{0,1},{1,0},{0,-1},{-1,0}};
public PathNode findPath(int[][] grid, PathNode start, PathNode end) {
// 使用优先队列存储待探索节点
PriorityQueue<PathNode> openSet = new PriorityQueue<>(
Comparator.comparingInt(n -> n.cost));
// 维护已探索节点信息
Map<String, PathNode> explored = new HashMap<>();
// 算法主逻辑
while(!openSet.isEmpty()) {
PathNode current = openSet.poll();
if(current.x == end.x && current.y == end.y) {
return current; // 找到目标路径
}
// 探索相邻节点
for(int[] move : MOVES) {
int nx = current.x + move[0];
int ny = current.y + move[1];
// 节点处理逻辑...
}
}
return null; // 未找到可行路径
}
}
高效任务分配机制
动态优先级设定
基于实时数据分析,系统可以动态调整任务优先级。考虑因素包括:
- 订单紧急程度
- 机器人当前负载
- 任务执行难度
- 能源状况
多机协同策略
通过分布式任务分配算法,实现机器人之间的高效协作。系统会实时监控各机器人状态,智能分配任务以避免资源闲置或过载。
总结展望
Java大数据技术正在重塑智能物流的未来。随着算法持续优化和硬件性能提升,我们有理由相信,更高效、更智能的仓储解决方案即将到来。期待与各位技术同仁继续探索这一充满潜力的领域。
文章整理自互联网,只做测试使用。发布者:Lomu,转转请注明出处:https://www.it1024doc.com/10503.html